A megbízhatóság a legfontosabb a forgalomfigyelő kamerák esetében. Közhelynek hangozhat, de elég egyetlen kihagyott jármű, és a forgalomfigyelési projekt sikerességi aránya azonnal veszélybe kerül a bevétel- és reputációvesztés miatt. Az automatikus rendszámfelismerő (ANPR) kamerák gyártói, mint az Adaptive Recognition, ezzel nagyon is tisztában vannak. Folyamatosan új triggereket fejlesztenek a kamerákhoz. Így abban a pillanatban, amikor egy autó vagy egy rendszámtábla elhalad, a kamerák olyan képeket tudnak készíteni, amelyeket az ANPR szoftver könnyen be tud olvasni.
Ezek a módszerek bevált és kipróbált megoldásokat foglalnak magukban, mint a lézertrigger vagy a jó öreg radar, illetve a hagyományos induktív hurkok. A hardveralapú triggereket továbbra is a legmegbízhatóbbnak tartják, mivel kevésbé hajlamosak a meghibásodásra. Ez azonban nem jelenti azt, hogy ne lennének más módszerek a járművek rögzítésére. A szoftveres triggereket számos okból egyre szélesebb körben alkalmazzák az ANPR kamerákban.
Az integrátorok és az út barátja
A szoftveres triggerek növekvő népszerűsége mögött az áll, hogy mindegyik nem invazív. Mit jelent ez a gyakorlatban? Vegyük példaként az indukciós hurkot.
A lézeres triggerhez hasonlóan az indukciós hurok hardveralapú, és biztosítja a szükséges pontossági szintet. Maga a technológia is egyszerű, mivel a triggerelés fizikai érintkezésen alapul – az autó hozzáér az útfelület alá épített szenzorokhoz. Azonban az, hogy az út alatt helyezkedik el, egyben az indukciós hurok legnagyobb hátránya is. Az egyetlen módja annak, hogy a szenzorok a helyükre kerüljenek, egy rendkívül megterhelő folyamat. Ehhez le kell zárni a sávot, fel kell vágni az utat – gyakran egészen az alapjáig –, majd a szükséges szenzorok telepítése után helyre kell állítani az aszfaltot/betont, hogy a forgalom újra zavartalan lehessen. És függetlenül attól, milyen gyorsan dolgoznak a telepítők, a lezárt sávok egyet jelentenek a dugókkal, a dühös sofőrökkel és egy olyan számlával, amit egyetlen útüzemeltető sem akar látni.
A szoftveres triggerelés lehetővé teszi, hogy elkerüld ezt a fajta felfordulást, mivel az észlelési zóna csak virtuális formában létezik. Igaz, ezek a triggerek a fizikai érintkezés hiánya miatt nem feltétlenül olyan hatékonyak, mint a hardveralapú megfelelőik – de a szoftvertechnológia fejlődésének köszönhetően néhány nem invazív trigger észlelési hatékonyságban már felveszi a versenyt a lézerrel és az indukciós hurokkal. Bizonyos helyzetekben még az egyszerűbb szoftveres triggerek is elegendőek lehetnek, így az útprojektek tulajdonosainak rengeteg lehetőséget kínálnak.
5 szoftveres trigger típus
Vonalérzékelés
A vonalérzékelés nemcsak az összes szoftveralapú trigger „anyja”, hanem egyben a legegyszerűbb is. A kamerakezelőknek mindössze annyit kell tenniük, hogy a GUI-ban egy virtuális vonalat húznak az úton keresztben, azon a szakaszon, amelyet meg szeretnének figyelni. Ha egy jármű áthalad a vonalon, a trigger utasítja a rendszámfelismerő kamerát a kép elkészítésére.
Bár a beállítása a legegyszerűbb, a vonalérzékelés sajnos nem olyan hatékony, mint a fejlettebb megfelelői. Mivel az érzékelési zóna viszonylag kicsi, előfordulhat, hogy az autók úgy haladnak el, hogy nem aktiválják a kamerát. Ez különösen problémás, ha túl gyorsan haladnak, vagy a zónát egy másik járművel egy időben érik el, amely egy ezredmásodperccel a másik előtt aktiválja a kamerát. Ezek miatt a vonalérzékelés szóba sem jöhet többsávos triggereléshez, még ha kézenfekvő választásnak is tűnik.
Mozgásérzékelés
Egy másik, viszonylag egyszerű koncepción alapuló szoftveres trigger a mozgásérzékelés, amely egy objektum környezetében bekövetkező változásokra összpontosít. A gyakorlatban ez azt jelenti, hogy a kamera készenléti módban marad, ha nem észlel a megfigyelt sávhoz kapcsolódó mozgást. Amint egy jármű belép a képkockába, a környezet megváltozik, amit a kamera változásként értelmez, és így aktiválódik, hogy elkészítse a szükséges képet.
A vonalérzékeléssel ellentétben a mozgásérzékelés jobb eredményeket ad, de csak tökéletes körülmények között. Amint valami eltakarja a forgalomfigyelő kamera szenzorait – pl. sötétség, heves eső vagy köd –, kizárólag a mozgásérzékelésre támaszkodni jelentős kockázattá válik. Ezért a legjobb kiegészíteni, vagy teljesen kiváltani egy másik triggerelési módszerrel, hogy garantáltan ANPR-kész képek készüljenek. Ellenkező esetben a kamera automatikusan törli a képeket, mert nem fogja eseményként regisztrálni őket.
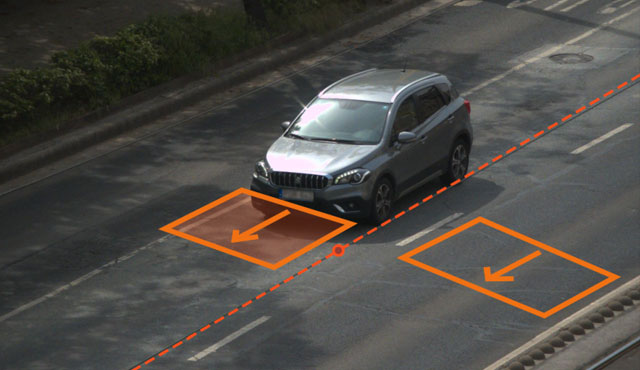
Objektumkövetés
Az objektumkövetés az egyik jobb szoftveralapú trigger, amely nem támaszkodik sem egy előre beállított virtuális zónára, sem a kamera környezetében bekövetkező változások folyamatos figyelésére. Ez a megoldás kétségtelenül fejlettebb, mint a korábban ismertetett szoftveres triggerelési módszerek. Ennek ellenére az integrátorok részéről különös odafigyelést igényel az ANPR-rendszer beállításakor.
A legjobb eredmények érdekében a forgalomfigyelő kamerának és a mögötte álló szoftvernek meg kell határoznia, hogy van-e objektum a képen, és azonosítania kell azt az objektumot járműként, mielőtt a rögzített képet további feldolgozásra továbbítaná az ANPR motor felé. Érdemes megjegyezni, hogy még a legjobb beállítások mellett is fennáll a kockázata annak, hogy a kamerák nem észlelik a kisebb járműveket, például a motorkerékpárokat. Ezt azonban a kamera és a szoftvere el tudja kerülni, ha a telepítők „megtanítják” őket az ilyen helyzetek kezelésére. Ha ez megtörtént, semmi sem akadályozza meg a kamerát és a szoftvert abban, hogy helyesen készítsen felvételeket; kizárólag akkor, amikor a járművek bekerülnek a képbe.
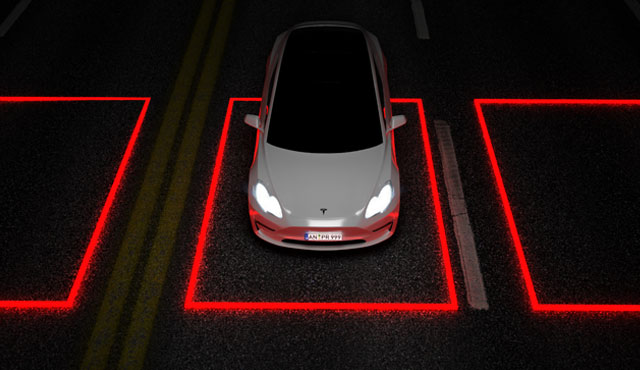
Virtuális hurok
A virtuális hurok olyan, mint Kevin Flynn a kultikus Tron című filmből: a jó öreg indukciós hurok teljesen digitalizált változata. Ennek megfelelően tökéletesen ötvözi az indukciós hurok előnyeit; az azonnali, tűpontos aktiválást, valamint azt a kényelmet, hogy nem kell megbontani az útburkolatot. Sőt, mivel nem korlátozzák őket fizikai szenzorok, az integrátorok szabadon dönthetik el, mekkora legyen az aktiválási zóna. Egy megfelelően beállított zónával az ANPR-tökéletes képek garantáltak.
Egy apró emlékeztető: nem invazív jellege ellenére még mindig egy indukciós hurokról beszélünk, fizikai megjelenés nélkül. Ezért a legjobb, ha a virtuális hurkot egy valódi indukciós hurokhoz hasonlóan állítjuk be. Koncentráljon egyetlen sávra, és digitálisan rajzoljon egy akkora kioldási zónát, amely elég nagy ahhoz, hogy a kamera akkor aktiválódjon, amikor egy jármű áthalad rajta.
Rendszámkereső
Az Adaptive Recognition által fejlesztett Plate Finder a virtuális és az intelligens objektumészlelés ötletes kombinációja. Amint egy jármű belép az ANPR kamera – Vidar LPR kamera – látómezejébe, a szoftver megkeresi a rendszámtábláját. Ha észlel egy rendszámtáblát, a kamera tudja, hogy jármű van jelen. Ezután rögzíti a képet az ANPR feldolgozáshoz.
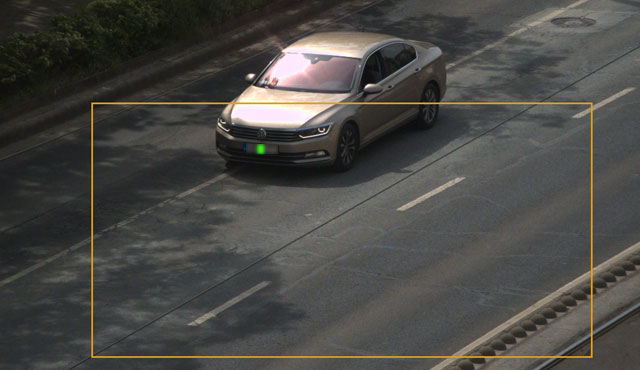
A Vidar esetében, amely eddigi legerősebb forgalomfigyelő kameránk, az ANPR feldolgozás a készüléken történik. Amint a Plate Finder elkészíti a képet, a kamera kinyeri belőle a szükséges forgalmi kódokat. Pontosabban ez a rendszámtábla karaktereit jelenti.
Kérdése vagy érdeklődése van? Minden lépésnél támogatjuk, sőt tesztelési célokra letölthető, ingyenes LPR szoftvert is biztosítunk.