Niezawodność ma kluczowe znaczenie w przypadku kamer monitorujących ruch drogowy. Może brzmieć to jak truizm, ale wystarczy jeden pominięty pojazd, aby skuteczność całego projektu monitorowania ruchu została natychmiast zagrożona — z powodu utraty przychodów oraz reputacji. Producenci kamer do automatycznego rozpoznawania tablic rejestracyjnych (ANPR), tacy jak Adaptive Recognition, są tego doskonale świadomi. Nieustannie opracowują nowe wyzwalacze dla kamer, aby w momencie, gdy pojazd lub tablica rejestracyjna przejeżdża obok, kamery mogły tworzyć obrazy, które oprogramowanie ANPR z łatwością odczyta.
Metody te obejmują sprawdzone rozwiązania, takie jak laser, tradycyjny radar czy klasyczne pętle indukcyjne. Wyzwalacze sprzętowe nadal uchodzą za najbardziej niezawodne, ponieważ są mniej podatne na awarie. Nie oznacza to jednak, że nie istnieją inne sposoby rejestrowania pojazdów. Wyzwalacze programowe stają się coraz bardziej powszechne w kamerach ANPR z wielu powodów."
Przyjaciel integratorów i dróg
Rośnąca popularność wyzwalaczy programowych wynika z faktu, że są one całkowicie nieinwazyjne. Co to oznacza w praktyce? Jako przykład weźmy pętlę indukcyjną.
Podobnie jak laserowy wyzwalacz, pętla indukcyjna jest rozwiązaniem sprzętowym i zapewnia wymagany poziom dokładności. Sama technologia jest bardzo prosta, ponieważ wyzwalanie odbywa się na podstawie kontaktu fizycznego — pojazd przejeżdża nad czujnikami umieszczonymi pod nawierzchnią drogi. Jednak to właśnie umiejscowienie pod jezdnią jest największą wadą pętli indukcyjnej. Jedynym sposobem instalacji czujników jest wyjątkowo trudny proces. Wymaga on zamknięcia pasa ruchu, rozcięcia nawierzchni — często aż do jej fundamentów — a po zamontowaniu czujników odbudowania asfaltu lub betonu, aby ruch mógł znów odbywać się bez zakłóceń. I niezależnie od tego, jak szybko pracują instalatorzy, zamknięte pasy oznaczają korki, sfrustrowanych kierowców oraz rachunki, których żaden zarządca dróg nie chce oglądać.
Wyzwalanie programowe pozwala uniknąć takiego zamieszania, ponieważ strefa detekcji istnieje wyłącznie w formie wirtualnej. Owszem, takie wyzwalacze mogą nie dorównywać skutecznością swoim sprzętowym odpowiednikom — ze względu na brak kontaktu fizycznego — ale dzięki postępowi technologicznemu niektóre rozwiązania nieinwazyjne osiągnęły już poziom lasera i pętli indukcyjnej pod względem efektywności detekcji. Nawet prostsze wyzwalacze programowe mogą być wystarczające w określonych sytuacjach, oferując właścicielom projektów drogowych szeroki wybór.
5 typów wyzwalaczy programowych
Detekcja linii
Detekcja linii to nie tylko „matka” wszystkich wyzwalaczy programowych, ale także najprostsza z nich. Operatorzy kamer muszą jedynie narysować w interfejsie graficznym wirtualną linię na jezdni, którą chcą monitorować. Jeśli pojazd przekroczy tę linię, wyzwalacz nakazuje kamerze ANPR wykonanie zdjęcia.
Choć jest najłatwiejsza do konfiguracji, detekcja linii niestety nie dorównuje skutecznością bardziej zaawansowanym metodom. Ponieważ strefa detekcji jest stosunkowo niewielka, istnieje szansa, że pojazdy przejadą bez wywołania zdjęcia. Jest to szczególnie problematyczne, gdy jadą z dużą prędkością lub wjeżdżają w strefę równocześnie z innym pojazdem, który wyzwoli kamerę o ułamek milisekundy wcześniej. Z tych powodów detekcja linii nie nadaje się do wyzwalania na wielu pasach, nawet jeśli początkowo wydaje się oczywistym wyborem.
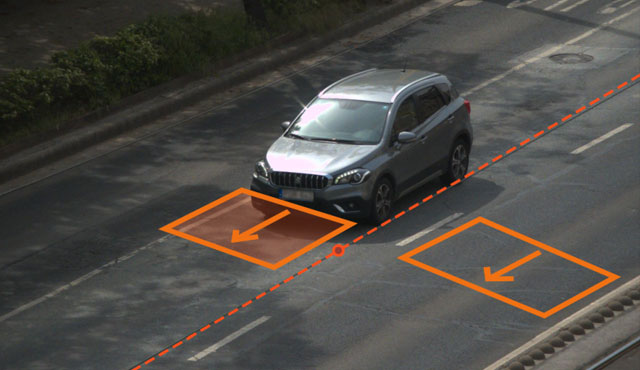
Detekcja ruchu
Kolejnym wyzwalaczem programowym opartym na stosunkowo prostym koncepcie jest detekcja ruchu, która koncentruje się na zmianach w otoczeniu obiektu. W praktyce oznacza to, że kamera pozostaje w trybie czuwania, jeśli nie wykrywa żadnego ruchu związanego z monitorowanym pasem. W momencie, gdy pojazd pojawia się w kadrze, otoczenie ulega zmianie, co kamera interpretuje jako impuls do wykonania wymaganej fotografii.
W przeciwieństwie do detekcji linii, detekcja ruchu zapewnia lepsze wyniki, ale tylko w idealnych warunkach. W chwili, gdy coś zasłoni sensory kamery — na przykład ciemność, ulewny deszcz lub mgła — poleganie wyłącznie na detekcji ruchu staje się poważnym ryzykiem. Dlatego najlepiej jest ją uzupełnić lub całkowicie zastąpić inną metodą wyzwalania, aby zagwarantować obrazy gotowe do analizy ANPR. W przeciwnym razie kamera automatycznie usuwa zdjęcia, ponieważ nie rozpoznaje ich jako zdarzenia."
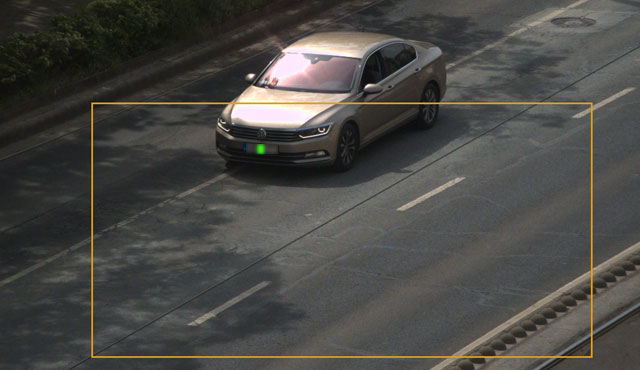
Śledzenie obiektów
Śledzenie obiektów jest jednym z lepszych wyzwalaczy programowych, ponieważ nie opiera się ani na wstępnie zdefiniowanej wirtualnej strefie, ani na ciągłym wykrywaniu zmian w otoczeniu kamery. Rozwiązanie to jest bez wątpienia bardziej zaawansowane niż wcześniej opisane metody programowego wyzwalania. Nadal wymaga jednak szczególnej uwagi ze strony integratorów podczas konfiguracji systemu ANPR.
Aby uzyskać najlepsze rezultaty, kamera monitorująca ruch oraz oprogramowanie za nią stojące muszą ustalić, czy na obrazie znajduje się obiekt, a następnie rozpoznać ten obiekt jako pojazd, zanim prześlą uchwycony obraz do dalszego przetwarzania w silniku ANPR. Warto zauważyć, że nawet przy najlepszej konfiguracji istnieje ryzyko, że kamery nie wykryją mniejszych pojazdów, takich jak motocykle. Jest to jednak coś, czemu kamera i jej oprogramowanie mogą zapobiec, jeśli instalatorzy „nauczą” system radzenia sobie z takimi sytuacjami. Po wykonaniu tej konfiguracji kamera i oprogramowanie bezbłędnie wykonują zdjęcia — ale tylko wtedy, gdy pojazdy pojawią się w kadrze.
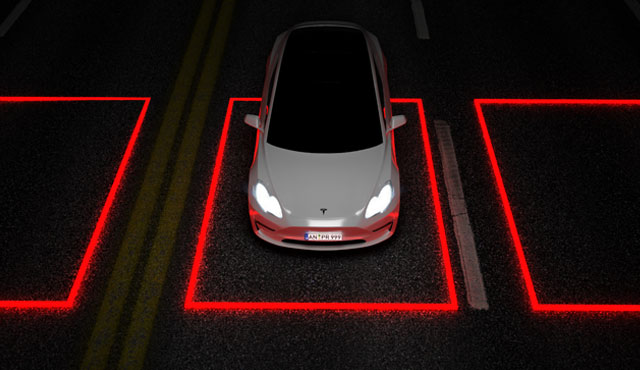
Wirtualna pętla
Wirtualna pętla jest jak Kevin Flynn z kultowego filmu Tron: w pełni zdigitalizowana wersja starej, dobrej pętli indukcyjnej. Dzięki temu idealnie łączy zalety pętli indukcyjnej — natychmiastowe, precyzyjne wyzwalanie — z wygodą wynikającą z braku konieczności naruszania nawierzchni drogi. Co więcej, ponieważ nie ograniczają jej fizyczne czujniki, integratorzy mogą dowolnie określić wielkość strefy wyzwalania. Przy prawidłowo skonfigurowanej strefie gwarantowane są obrazy idealne do analizy ANPR.
Małe przypomnienie: mimo że jest nieinwazyjna, nadal mówimy o pętli indukcyjnej bez fizycznej formy. Dlatego najlepiej skonfigurować wirtualną pętlę w sposób zbliżony do rzeczywistej pętli indukcyjnej. Skup się na jednym pasie ruchu i narysuj cyfrowo strefę wyzwalania wystarczająco dużą, aby aktywowała kamerę, gdy pojazd przez nią przejedzie.
Plate Finder
Opracowany przez Adaptive Recognition, Plate Finder to sprytne połączenie wirtualnej detekcji i inteligentnego wykrywania obiektów. Gdy pojazd wjedzie w pole widzenia kamery ANPR – Vidar, oprogramowanie wyszukuje jego tablicę rejestracyjną. Jeśli wykryje tablicę, kamera wie, że pojazd jest obecny. Następnie wykonuje zdjęcie do dalszego przetwarzania w systemie ANPR."
W przypadku Vidar, naszej najpotężniejszej dotąd kamery do monitorowania ruchu, przetwarzanie ANPR odbywa się bezpośrednio na urządzeniu. Gdy tylko Plate Finder wykona zdjęcie, kamera wyodrębnia z niego potrzebne kody ruchu. Mówiąc dokładniej — znaki z tablicy rejestracyjnej.
Masz pytania lub potrzebujesz dodatkowych informacji? Jesteśmy tu, aby wspierać cię na każdym etapie — oferujemy nawet bezpłatne oprogramowanie LPR do pobrania w celu testów.